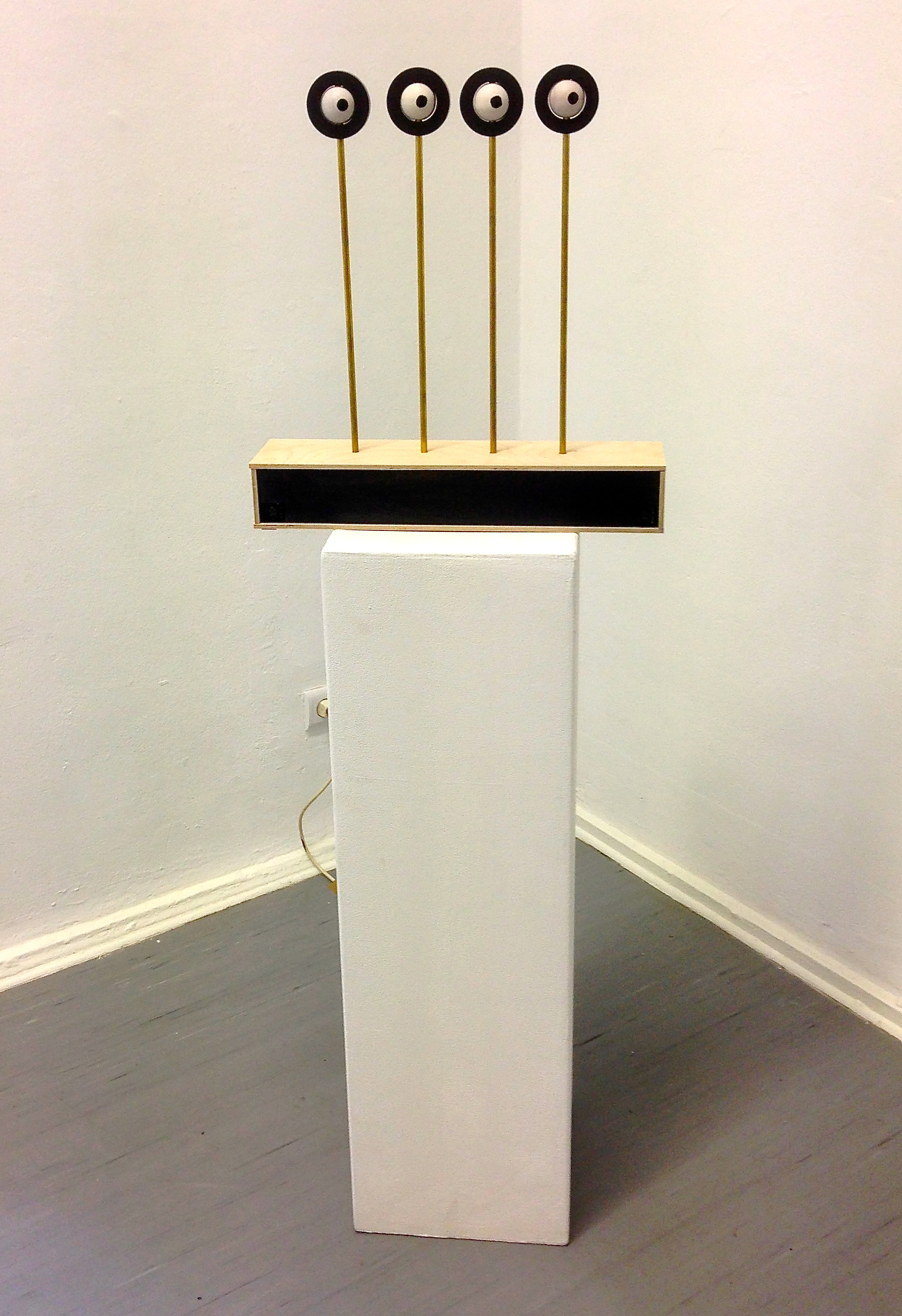
These penetrating observers are meant to peer at whoever is standing nearby. In 2014, everyone knows who Edward Snowden is and what he told us.
These penetrating observers are meant to peer at whoever is standing nearby. In 2014, everyone knows who Edward Snowden is and what he told us.
